[TOC]
USB3.0
USB2.0的最大理论传输带宽为480Mb/s(即60MB/s),USB3.0的最大传输带宽则高达5.0Gb/s(500MB/s)。
注意:5Gb/s的带宽并不是5Gb/s除以8得到的625MB/s,而是采用与SATA相同的10位传输模式(在USB2.0的基础上新增了一对纠错码),因此器全速只有500MB/s。
USB3.0引入全双工数据传输,5根线路中两根用来发送数据,另两根用来接收数据,还有一根地线。换句话说,USB3.0可以同步全速地进行读/写操作。以前的USB版本不支持全双工数据传输。
USB3.0控制器FX3电路
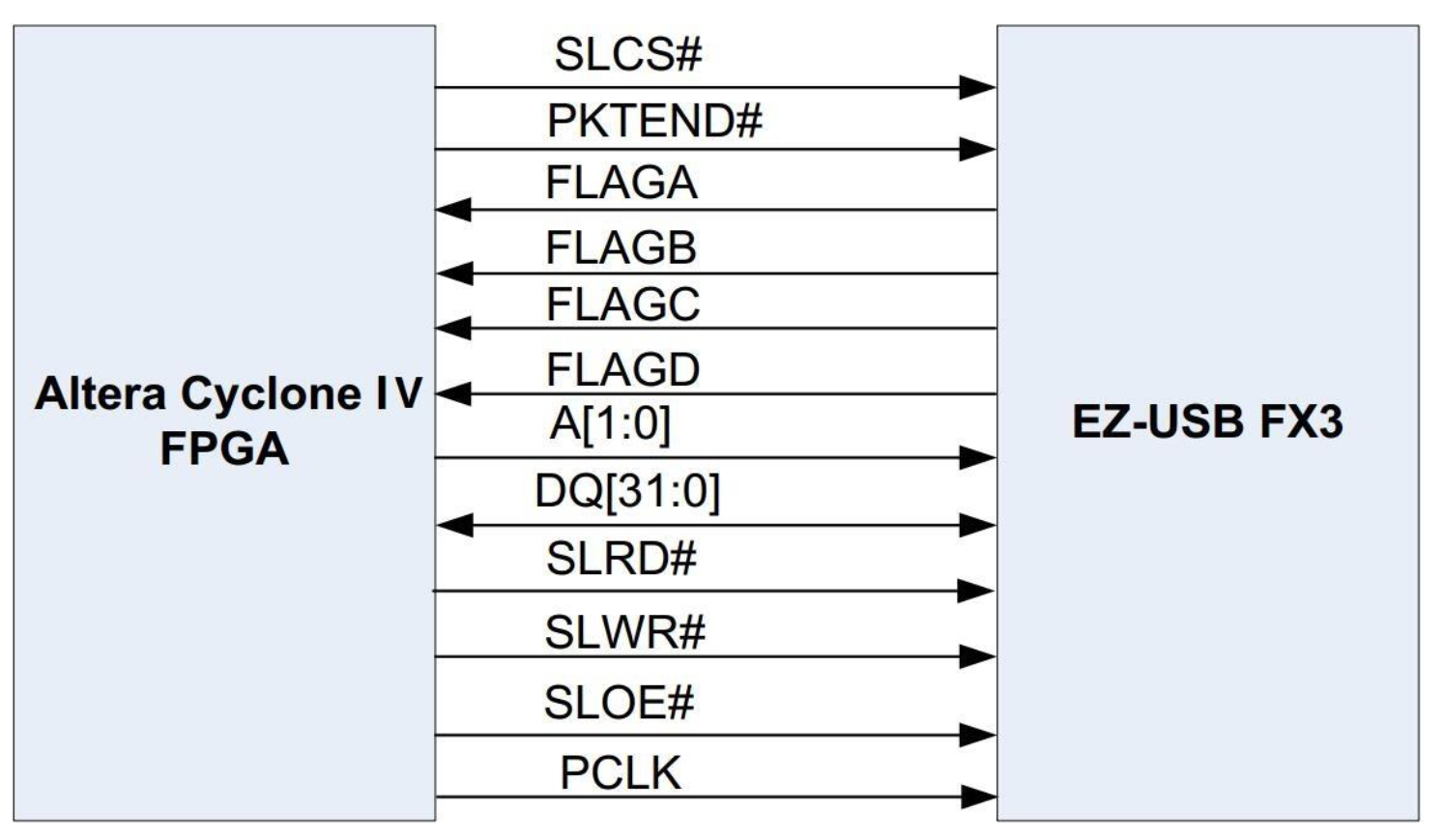
USB3.0控制器FX3与FPGA之间通过SlaveFIFO接口互联,实现大吞吐量数据传输。
fx3_d[31:0]
fx3_a[1:0] (CTL[11]/A CTL[12]/A0)
fx3_clk (PCLK)
fx3_slcs# (CTL[0]/SLCS#)
fx3_slwr# (CTL[1]/SLWR#)
fx3_sloe# (CTL[2]/SLOE#)
fx3_rd# (CTL[3]/SLRD#)
fx3_pktend# (CTL[7]/PKTEND#)
fx3_flaga (CTL[4]/FLAGA)
fx3_flagb (CTL[5]/FLAGB)
fx3_flagc (CTL[8]/GPIO)
fx3_flagd (GTL[9]/GPIO)
复位引脚接上电复位和按键–手动复位。
启动模式:
PMODE[0]
PMODE[1]
PMODE[2]
PMODE[2:0]=F1F I2C启动,如失败,则启用USB引导
PMODE[2:-]=F11 USB引导
USB3.0控制器FX3实例
基于FX3内部DMA的USB传输Loopback实例
Cypress官方提供的固件代码,在 ..\Cypress\EZ-USB FX3 SDK\1.3\fireware\basic_examples\cyfxbulklpautoenum
通过FX3的一对USB Bulk端点实现Loopback的功能。所谓Loopback,通俗地说,就是FX3接收到任何数据,就将其发送出去;从PC端的调试软件看,就是PC给FX3传输什么数据,紧接着就接收到相同的返回数据。
这个Loopback功能的实现过程中,FX3内的ARM9是不参与数据本身的任何传输的,固件配置好后,USB端点之间通过DMA自动实现数据的传输。
基于FX3的UVC传输协议实例
FX3固件SlaveFIFO配置修改说明
功能概述
通过FX3与FPGA之家你的GPIF II接口通信,实现FPGA与FX3之间的数据交互,当然这些数据最终也传输到PC上。换句话说,通过FX3这个“桥梁”,实现FPGA与PC之间USB3.0接口的数据传输。
可以通过Cpyress官方提供的GPIF II Designer工具,获取GPIF II接口的配置参数,然后将这些参数传递给FX3的固件工程中进行编译。
基于FPGA-FX3 Slave FIFO接口的Loopback实例
实现PC端发送数据到FX3,FX3通过知识信号flaga告知FPGA有数据待读取,FPGA端通过SlaveFIFO接口读取PC端发送过来的数据缓存到FPGA内部的FIFO中,FPGA在完成读取操作后,发器一次SlaveFIFO的写入操作,将接收到的数据通过FX3最终返回到PC端。整个数据的收发过程可以在FPGA内部通过在线逻辑分析仪SignalTap II抓取SlaveFIFO接口的所有信号进行查看。
基于FPGA-FX3 Slave FIFO接口的StreamOUT实例
功能概述:
StreamOUT主要功能是PC端发送批量数据到FX3,FX3通过指示信号flaga告知FPGA有数据待读,然后FPGA端通过SlaveFIFO接口读取PC端发送过来的数据缓存到FPGA内部的FIFO中。整个数据的收发过程,在FPGA内部可以通过在线逻辑分析仪SignalTap II抓取SlaveFIFO接口的所有信号进行查看。
【PC】 <==USB3.0==> 【FX3】 <==Slave FIFO==> 【FPGA】
usb_controller模块是SlaveFIFO及其相关功能实现的主要模块。FX3 读/写状态机一旦检测到FX3的SlaveFIFO有可读取的数据,就进入FX3数据读取状态,读取SlaveFIFO中所有的数据,缓存到片内RAM中。
FX3读写状态机简述,上电状态为 FXS_REST,随后就进入 FXS_IDLE状态,判断SlaveFIFO是否有可读取数据,如果有则进入 FXS_READ状态读出FX3的SlaveFIFO中所有的数据,完成后在FXS_RDLY状态稍作延时,接着进入FXS_RSOP状态停留一个时钟周期,最后回到FXS_IDLE状态。
基于FPGA-FX3 Slave FIFO 接口的StreamIN实例
StreamIN主要功能是FPGA端产生批量数据,通过SlaveFIFO接口发送到FX3,直到FX3的多个FIFO通道写满。由于FX3是USB的从机,作为USB主机的PC需要发器读取FX3的待发送数据帧操作,一旦FX3有FIFO空出来,FPGA就再写入新的数据帧。
上电状态为FXS_REST,随后就进入FXS_IDLE状态,判断SlaveFIFO是否为空可以写入数据,如果可以则进入FXS_WRIT状态,写数据到FX3的SlaveFIFO中,接着进入FXS_WSOP状态停留一个时钟周期,最后回到FXS_IDLE状态。
USB_CONTROLLER.v
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
module usb_controller
(
input wire [ 0: 0] clk , //100MHz? 200MHz? 300MHz? 400MHz?
input wire [ 0: 0] rst_n ,
input wire [ 0: 0] fx3_flaga , //slave fifo write full when addr 00
input wire [ 0: 0] fx3_flagb , //slave fifo almost write full when addr 00, 6 byte data can be written after this negative
input wire [ 0: 0] fx3_flagc , //slave fifo read empty when addr 11
input wire [ 0: 0] fx3_flagd , //slave fifo read empty almost when addr 11
output reg [ 0: 0] fx3_pclk , //slave fifo sync clock
output reg [ 0: 0] fx3_slcs_n , //slave fifo chip select
output reg [ 0: 0] fx3_slwr_n , //slave fifo write enable
output reg [ 0: 0] fx3_slrd_n , //slave fifo read enable
output reg [ 0: 0] fx3_sloe_n , //slave fifo output enable
output reg [ 0: 0] fx3_pktend_n, //package end
output reg [ 1: 0] fx3_a , //
inout wire [31: 0] fx3_db ,
);
wire [ 9: 0] fifo_used; //fifo已经使用数据个数
reg [ 0: 0] fifo_rdreq; //fifo读请求信号,高电平有效
reg [ 0: 0] fx3_dir; //FX3读写方向指示信号,1--read,0--write
reg [ 9: 0] num; //数据寄存器
reg [ 3: 0] delaycnt; //延时计数寄存器
reg [ 3: 0] fxstate; //状态寄存器
parameter FXS_REST = 4'd0;
parameter FXS_IDLE = 4'd1;
parameter FXS_READ = 4'd2;
parameter FXS_RDLY = 4'd3;
parameter FXS_RSOP = 4'd4;
parameter FXS_WRIE = 4'd5;
parameter FXS_WSOP = 4'd6;
always @ (posedge clk or negedge rst_n)
if(!rst_n)
fx3_dir <= 1'b1; //read
else if(FXS_RSOP == fxstate)
fx3_dir <= 1'b0; //write
else if(FXS_WSOP == fxstate)
fx3_dir <= 1'b1; //read
//定时读取FX3 FIFO数据并送入FIFO
//定时读写操作状态机
always @ (posedge clk or negedge rst_n) begin
if(!rst_n) begin
fxstate <= FXS_REST;
end
else begin
case(fxstate)
FXS_REST: begin
fxstate <= FXS_IDLE;
end
FXS_IDLE: begin
if(fx3_flaga)
fxstate <= FXS_READ; //读数据,读取数据个数必须是8-1024
else
fxstate <= FXS_IDLE;
end
FXS_READ: begin
if(!fx3_flagb)
fxstate <= FXS_RDLY;
else
fxstate <= FXS_READ;
end
FXS_RDLY: begin //读取flagd拉低后的6个数据
if(delaycnt >= 4'd6)
fxstate <= FXS_RSOP;
else
fxstate <= FX_RDLY;
end
FXS_RSOP: begin
fxstate <= FXS_IDLE;
end
default: fxstate <= FXS_IDLE;
endcase
end
end
//数据计数器,用于产生读写时序
always @ (posedge clk or negedge rst_n) begin
if(!rst_n) begin
num <= 10'd0;
end
else if(fxstate == FXS_READ) begin
num <= num + 1'b1;
end
else begin
num <= 10'd0;
end
end
//6个clock的延时计数器
always @ (posedge clk or negedge rst_n) begin
if(!rst_n) begin
delaycnt <= 4'd0;
end
else if(FXS_RDLY==fxstate)
delaycnt <= delaycnt + 1'b1;
else begin
delaycnt <= 4'd0;
end
end
//FX3 slave fifo控制信号时序产生
parameter FX3_ON = 1'b0;
parameter FX3_OFF = 1'b1;
always @ (posedge clk or negedge rst_n) begin
if(!rst_n) begin
fx3_slcs_n <= FX3_OFF;
fx3_slwr_n <= FX3_OFF;
fx3_slrd_n <= FX3_OFF;
fx3_sloe_n <= FX3_OFF;
fx3_pktend_n<= FX3_OFF;
fx3_a <= 2'b11; //操作FIFO地址
end
else if(FXS_IDLE == fxstate) begin
fx3_slcs_n <= FX3_OFF;
fx3_slwr_n <= FX3_OFF;
fx3_slrd_n <= FX3_OFF;
fx3_sloe_n <= FX3_OFF;
fx3_pktend_n<=FX3_OFF;
fx3_a <= 2'b11;
/*
if(fx3_dir)
fx3_a <= 2'b11;//read
else
fx3_a <= 2'b00;//write
*/
end
else if(FXS_READ == fxstate) begin
fx3_slcs_n <= FX3_ON;
fx3_slwr_n <= FX3_OFF;
fx3_slrd_n <= FX3_ON;
fx3_sloe_n <= FX3_ON;
fx3_pktend_n<=FX3_OFF;
fx3_a <= 2'b11;
end
else if(FXS_RDLY == fxstate) begin
if(4'd2==delaycnt) begin
fx3_slcs_n <= FX3_ON;
fx3_slwr_n <= FX3_OFF;
fx3_slrd_n <= FX3_OFF;
fx3_sloe_n <= FX3_ON;
fx3_pktend_n<=FX3_OFF;
fx3_a <= 2'b11;
end
else if(delaycnt == 4'd6) begin
fx3_slcs_n <= FX3_OFF;
fx3_slwr_n <= FX3_OFF;
fx3_slrd_n <= FX3_OFF;
fx3_sloe_n <= FX3_OFF;
fx3_pktend_n<= FX3_OFF;
fx3_a <= 2'b11;
end
else begin
end
end
else begin
fx3_slcs_n <= FX3_OFF;
fx3_slwr_n <= FX3_OFF;
fx3_slrd_n <= FX3_OFF;
fx3_pktend_n<= FX3_OFF;
end
end
//slave fifo读操作数据缓存
reg [31: 0] fx3_rdb; //FX3读出数据缓存
reg [ 0: 0] fx3_rdb_en; //FX3读出数据有效标志位,高电平有效
wire[31: 0] fx3_wdb; //FX3写数据寄存器
always @ (posedge clk or negedge rst_n) begin
if(!rst_n) begin
fx3_rdb <= 16'd0;
fx3_rdb_en <= 1'b0;
end
else if( (FXS_READ==fxstate) && (10'd4 <= num) ) begin
fx3_rdb <= fx3_db;
fx3_rdb_en <= 1'b1;
end
else if( (FXS_RDLY==fxstate) && (4'd5>delaycnt) ) begin
fx3_rdb <= fx3_db;
fx3_rdb_en <= 1'b1;
end
else begin
fx3_rdb <= 16'd0;
fx3_rdb_en <= 1'b0;
end
end
//assign fx3_db = fx3_dir ? 32'hzzzzzzzz : fx3_wdb;
assign fx3_db = 32'hzzzzzzzz;
//RAM缓存FX3读出的数据
reg [ 7: 0] ram_addr;
always @ (posedge clk or negedge rst_n) begin
if(!rst_n) begin
ram_addr <= 8'd0;
end
else if(FXS_IDLE==fxstate) begin
ram_addr <= 8'd0;
end
else if(fx3_rdb_en)
ram_addr <= ram_addr + 1'b1;
else begin
end
end
//RAM例化
usbrd_ram_debug
usbrd_ram_debug_inst
(
.address ( ram_addr ) ,
.clock ( clk ) ,
.data ( {fx3_rdb[7:0], fx3_rdb[15:8], fx3_rdb[23:16], fx3_rdb[31:24]}),
.wren ( fx3_rdb_en ) ,
.q ( )
);
endmodule
基于CORDIC的信号发生器
Coordinate Rotation Digital Comuper是CORDIC算法的英文全称,大意是指旋转坐标接近答案。
| i | θi | cosθi | Πcosθi | 1/Πcosθi |
|---|---|---|---|---|
| 0 | 45.0 | 0.7071067812 | 0.7071067812 | 1.414213562 |
| 1 | 26.56505118 | 0.894427191 | 0.632455532 | 1.58113883 |
| 2 | 14.03624347 | 0.9701425001 | 0.6135719911 | 1.629800601 |
| 3 | 7.125016349 | 0.9922778767 | 0.6088339125 | 1.642484066 |
| 4 | 3.576334375 | 0.9980525785 | 0.6076482563 | 1.645688916 |
| 5 | 1.789910608 | 0.9995120761 | 0.6073517701 | 1.646492279 |
| 6 | 0.8951737102 | 0.999877952 | 0.6072776441 | 1.646693254 |
| 7 | 0.4476141709 | 0.9999694838 | 0.6072591123 | 1.646743507 |
| 8 | 0.2238105004 | 0.9999923707 | 0.6072544793 | 1.64675607 |
| 9 | 0.1119056771 | 0.99999980927 | 0.6072533211 | 1.646759211 |
| 10 | 0.05595289189 | 0.99999995232 | 0.6072530315 | 1.646759996 |
| 11 | 0.02797645262 | 0.999999998808 | 0.6072529591 | 1.646760193 |
| 12 | 0.01398822714 | 0.999999999702 | 0.607252941 | 1.646760242 |
| 13 | 0.006994113675 | 0.999999999925 | 0.6072529365 | 1.646760254 |
| 14 | 0.003497056851 | 0.999999999981 | 0.607252935 | 1.646760257 |
| 15 | 0.001748528427 | 0.999999999995 | 0.6072529351 | 1.646760258 |
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
#include <studio.h>
double cordic(double angle_para);
int main(void)
{
double para;
para = 30.0;
cordic(para);
return 0;
}
double cordic(double angle_para)
{
const double tangent[] = {1.0, 1/2.0, 1/4.0, 1/8.0, 1/16.0, 1/32.0, 1/64.0, 1/128.0, 1/512.0};
const double angle[] = {45.0, 26.6, 14.0, 7.1, 3.6, 1.8, 0.9, 0.4, 0.2, 0.1 };
int i, signal;
double x_cos;
double y_sin;
double x_temp;
double y_temp;
double z;
double z_next;
x_cos = 0.0;
y_sin = 0.0;
z = angle_para;
z_next = 0.0;
x_temp = 0.6073; // Πcosθi
y_temp = 0;
signal = 1;
for(i=0; i<9; i++)
{
x_cos = x_temp - signal*y_temp*tangent[i];
y_sin = y_temp + signal*x_temp*tangent[i];
z_next = z - signal*angle[i];
x_temp = x_cos;
y_temp = y_sin;
z = z_next;
if(z_next>0)
signal = +1;
else
signal = -1;
}
return 0;
}
具体操作流程
设置迭代次数为16, 则x0 = 0.607253(Πcosθi,i from 0 to 15),y0 = 0,兵输入待计算得角度θ,θ在[-99.7°, 99.7°]范围内。
根据三个迭代公式进行迭代,i从0到15:
X(i+1) = X(i) - d(i)Y(i)2^(-i)
Y(i+1) = Y(i) + d(i)X(i)2^(-i)
Z(i+1) = Z(i) - d(i)θ(i)
Postscript: Z0=θ,di与Zi同符号。
经过16此迭代计算后,得到的x16和y16分别为cosθ和sinθ。
CORDIC算法的Matlab实现代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
closeall;
clear;
clc;
%初始化
die = 16; %迭代次数
x = zeros(die+1, 1);
y = zeros(die+1, 1);
z = zeros(die+1, 1);
x(1) = 0.607253; %初始化设置
z(1) = pi/4; %待求角度θ
%迭代操作
for i=1: die
if z(i) >= 0
d = 1;
else
d = -1;
end
x(i+1) = x(i) - d*y(i)*( 2^(-(i-1)) );
y(i+1) = y(i) + d*x(i)*( 2^(-(i-1)) );
z(i+1) = z(i) - d*atan( 2^(-(i-1)) );
end
cosa = vpa( x(17), 10 );
sina = vpa( y(17), 10 );
c = vpa( z(17), 10);
FPGA有很多加速计算的方法,例如乒乓操作、流水线操作等。
CORDIC算法适合使用16级流水线。
为了避免浮点运算,为了满足精度要求,对每个变量都放大了2^16倍,并且引入了有符号型reg和算数右移。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
module cordic#(
parameter pipeline = 16;
parameter k = 32'h09b74; //k = 0.607253*2^16, 32'h09b74
)
(
input wire [ 0: 0] clk_50MHz ,
input wire [ 0: 0] rst_n ,
input wire [31: 0] phase ,
output reg signed [31: 0] sin ,
output wire signed [31: 0] cos ,
output wire signed [31: 0] error
);
`define rot0 32'd2949120 //45*2^16
`define rot1 32'd1740992 //26.5651*2^16
`define rot2 32'd919872 //14.0362*2^16
`define rot3 32'd466944 //7.1250*2^16
`define rot4 32'd234368 //3.5763*2^16
`define rot5 32'd117312 //1.7899*2^16
`define rot6 32'd58688 //0.8952*2^16
`define rot7 32'd29312 //0.4476*2^16
`define rot8 32'd14656 //0.2238*2^16
`define rot9 32'd7360 //0.1119*2^16
`define rot10 32'd3648 //0.0560*2^16
`define rot11 32'd1856 //0.0280*2^16
`define rot12 32'd896 //0.0140*2^16
`define rot13 32'd448 //0.0070*2^16
`define rot14 32'd256 //0.0035*2^16
`define rot15 32'd128 //0.0018s*2^16
reg signed [31: 0] x0 = 0, y0 = 0, z0 = 0;
reg signed [31: 0] x1 = 0, y1 = 0, z1 = 0;
reg signed [31: 0] x2 = 0, y2 = 0, z2 = 0;
reg signed [31: 0] x3 = 0, y3 = 0, z3 = 0;
reg signed [31: 0] x4 = 0, y4 = 0, z4 = 0;
reg signed [31: 0] x5 = 0, y5 = 0, z5 = 0;
reg signed [31: 0] x6 = 0, y6 = 0, z6 = 0;
reg signed [31: 0] x7 = 0, y7 = 0, z7 = 0;
reg signed [31: 0] x8 = 0, y8 = 0, z8 = 0;
reg signed [31: 0] x9 = 0, y9 = 0, z9 = 0;
reg signed [31: 0] x10 = 0, y10 = 0, z10 = 0;
reg signed [31: 0] x11 = 0, y11 = 0, z11 = 0;
reg signed [31: 0] x12 = 0, y12 = 0, z12 = 0;
reg signed [31: 0] x13 = 0, y13 = 0, z13 = 0;
reg signed [31: 0] x14 = 0, y14 = 0, z14 = 0;
reg signed [31: 0] x15 = 0, y15 = 0, z15 = 0;
reg signed [31: 0] x16 = 0, y16 = 0, z16 = 0;
reg [ 1: 0] quadrant[pipeline: 0];
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x0 <= 1'b0;
y0 <= 1'b0;
z0 <= 1'b0;
end
else begin
x0 <= k;
y0 <= 32'd0;
z0 <= Phase[15: 0]<<16;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x1 <= 1'b0;
y1 <= 1'b0;
z1 <= 1'b0;
end
else if(z0[31]) begin
x1 <= x0 + y0;
y1 <= y0 - x0;
z1 <= z0 + `rot0;
end
else begin
x1 <= x0 - y0;
y1 <= y0 + x0;
z1 <= z0 - `rot0;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x2 <= 1'b0;
y2 <= 1'b0;
z2 <= 1'b0;
end
else if(z1[31]) begin
x2 <= x1 + (y1 >>> 1);
y2 <= y1 - (x1 >>> 1);
z2 <= z1 + `rot1;
end
else begin
x2 <= x1 - (y1 >>> 1);
y2 <= y1 + (x1 >>> 1);
z2 <= z1 - `rot1;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x3 <= 1'b0;
y3 <= 1'b0;
z3 <= 1'b0;
end
else if(z2[31]) begin
x3 <= x2 + (y2 >>> 2);
y3 <= y2 - (x2 >>> 2);
z3 <= z2 + `rot2;
end
else begin
x3 <= x2 - (y2 >>> 2);
y3 <= y2 + (x2 >>> 2);
z3 <= z2 - `rot2;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x4 <= 1'b0;
y4 <= 1'b0;
z4 <= 1'b0;
end
else if(z3[31]) begin
x4 <= x3 + (y3 >>> 3);
y4 <= y3 - (x3 >>> 3);
z4 <= z3 + `rot3;
end
else begin
x4 <= x3 - (y3 >>> 3);
y4 <= y3 + (x3 >>> 3);
z4 <= z3 - `rot3;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x5 <= 1'b0;
y5 <= 1'b0;
z5 <= 1'b0;
end
else if(z4[31]) begin
x5 <= x4 + (y4 >>> 4);
y5 <= y4 - (x4 >>> 4);
z5 <= z4 + `rot4;
end
else begin
x5 <= x4 - (y4 >>> 4);
y5 <= y4 + (x4 >>> 4);
z5 <= z4 - `rot4;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x6 <= 1'b0;
y6 <= 1'b0;
z6 <= 1'b0;
end
else if(z5[31]) begin
x6 <= x5 + (y5 >>> 5);
y6 <= y5 - (x5 >>> 5);
z6 <= z5 + `rot5;
end
else begin
x6 <= x5 - (y5 >>> 5);
y6 <= y5 + (x5 >>> 5);
z6 <= z5 - `rot5;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x7 <= 1'b0;
y7 <= 1'b0;
z7 <= 1'b0;
end
else if(z6[31]) begin
x7 <= x6 + (y6 >>> 6);
y7 <= y6 - (x6 >>> 6);
z7 <= z6 + `rot6;
end
else begin
x7 <= x6 - (y6 >>> 6);
y7 <= y6 + (x6 >>> 6);
z7 <= z6 - `rot6;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x8 <= 1'b0;
y8 <= 1'b0;
z8 <= 1'b0;
end
else if(z7[31]) begin
x8 <= x7 + (y7 >>> 7);
y8 <= y7 - (x7 >>> 7);
z8 <= z7 + `rot7;
end
else begin
x8 <= x7 - (y7 >>> 7);
y8 <= y7 + (x7 >>> 7);
z8 <= z7 - `rot7;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x9 <= 1'b0;
y9 <= 1'b0;
z9 <= 1'b0;
end
else if(z8[31]) begin
x9 <= x8 + (y8 >>> 8);
y9 <= y8 - (x8 >>> 8);
z9 <= z8 + `rot8;
end
else begin
x9 <= x8 - (y8 >>> 8);
y9 <= y8 + (x8 >>> 8);
z9 <= z8 - `rot8;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x10 <= 1'b0;
y10 <= 1'b0;
z10 <= 1'b0;
end
else if(z9[31]) begin
x10 <= x9 + (y9 >>> 9);
y10 <= y9 - (x9 >>> 9);
z10 <= z9 + `rot9;
end
else begin
x10 <= x9 - (y9 >>> 9);
y10 <= y9 + (x9 >>> 9);
z10 <= z9 - `rot9;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x11 <= 1'b0;
y11 <= 1'b0;
z11 <= 1'b0;
end
else if(z10[31]) begin
x11 <= x10 + (y10 >>> 10);
y11 <= y10 - (x10 >>> 10);
z11 <= z10 + `rot10;
end
else begin
x11 <= x10 - (y10 >>> 10);
y11 <= y10 + (x10 >>> 10);
z11 <= z10 - `rot10;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x12 <= 1'b0;
y12 <= 1'b0;
z12 <= 1'b0;
end
else if(z11[31]) begin
x12 <= x11 + (y >>> 11);
y12 <= y11 - (x >>> 11);
z12 <= z11 + `rot11;
end
else begin
x12 <= x11 - (y >>> 11);
y12 <= y11 + (x >>> 11);
z12 <= z11 - `rot11;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x13 <= 1'b0;
y13 <= 1'b0;
z13 <= 1'b0;
end
else if(z12[31]) begin
x13 <= x12 + (y >>> 12);
y13 <= y12 - (x >>> 12);
z13 <= z12 + `rot12;
end
else begin
x13 <= x12 - (y >>> 12);
y13 <= y12 + (x >>> 12);
z13 <= z12 - `rot12;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x14 <= 1'b0;
y14 <= 1'b0;
z14 <= 1'b0;
end
else if(z13[31]) begin
x14 <= x13 + (y >>> 13);
y14 <= y13 - (x >>> 13);
z14 <= z13 + `rot13;
end
else begin
x14 <= x13 - (y >>> 13);
y14 <= y13 + (x >>> 13);
z14 <= z13 - `rot13;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x15 <= 1'b0;
y15 <= 1'b0;
z15 <= 1'b0;
end
else if(z14[31]) begin
x15 <= x14 + (y >>> 14);
y15 <= y14 - (x >>> 14);
z15 <= z14 + `rot14;
end
else begin
x15 <= x14 - (y >>> 14);
y15 <= y14 + (x >>> 14);
z15 <= z14 - `rot14;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
x16 <= 1'b0;
y16 <= 1'b0;
z16 <= 1'b0;
end
else if(z15[31]) begin
x16 <= x15 + (y >>> 15);
y16 <= y15 - (x >>> 15);
z16 <= z15 + `rot15;
end
else begin
x16 <= x15 - (y >>> 15);
y16 <= y15 + (x >>> 15);
z16 <= z15 - `rot15;
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
quadrant[0] <= 1'b0;
quadrant[1] <= 1'b0;
quadrant[2] <= 1'b0;
quadrant[3] <= 1'b0;
quadrant[4] <= 1'b0;
quadrant[5] <= 1'b0;
quadrant[6] <= 1'b0;
quadrant[7] <= 1'b0;
quadrant[8] <= 1'b0;
quadrant[9] <= 1'b0;
quadrant[10] <= 1'b0;
quadrant[11] <= 1'b0;
quadrant[12] <= 1'b0;
quadrant[13] <= 1'b0;
quadrant[14] <= 1'b0;
quadrant[15] <= 1'b0;
quadrant[16] <= 1'b0;
end
else begin
quadrant[0] <= phase[17:16];
quadrant[1] <= quadrant[0];
quadrant[2] <= quadrant[1];
quadrant[3] <= quadrant[2];
quadrant[4] <= quadrant[3];
quadrant[5] <= quadrant[4];
quadrant[6] <= quadrant[5];
quadrant[7] <= quadrant[6];
quadrant[8] <= quadrant[7];
quadrant[9] <= quadrant[8];
quadrant[10] <= quadrant[9];
quadrant[11] <= quadrant[10];
quadrant[12] <= quadrant[11];
quadrant[13] <= quadrant[12];
quadrant[14] <= quadrant[13];
quadrant[15] <= quadrant[14];
quadrant[16] <= quadrant[15];
end
end
always @ (posedge clk_50MHz or negedge rst_n) begin
if(!rst_n) begin
cos <= 1'b0;
sin <= 1'b0;
error<= 1'b0;
end
else begin
error <= z16;
case(quadrant[16])
//if the phase is in first quadrant,the sin(x)=sin(a), cos(x)=cos(a)
2'b00: begin
cos <= x16;
sin <= y16;
end
//if the phase is in second quadrant,the sin(x)=sin(a+90)=cos(a), cos(x) = cos(a+90)=-sin(a)
2'b01: begin
cos <= ~(y16) + 1'b1; //-sin
sin <= x16;
end
//if the phase is in third quadrant, the sin(x)=sin(a+180)=-sin(a), cos(x)=cos(a+180)=-cos(a)
2'b10: begin
cos <= ~(x16) + 1'b1; //-cos
sin <= x16; //-sin
end
//if the phase is in forth quadrant, the sinx(x)=sin(a+270)=-cos(A), cos(x) = cos(a+270)=sin(a)
2'b11: begin
cos <= y16; //sin
sin <= ~(x16) + 1'b1; //-cos
end
default: begin
end
endcase
end
end
endmodule
仿真代码Testbench:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
`timescale 1ps/1ps
module Cordic_tb;
//input
reg [ 0: 0] clk_50MHz ;
reg [ 0: 0] rst_n ;
reg [15: 0] cnt ;
reg [15: 0] cnt_n ;
reg [31: 0] Phase ;
reg [31: 0] Phase_n ;
wire [31: 0] Sin ;
wire [31: 0] Cos ;
wire [31: 0] Error ;
//
COrdic uut
(
.clk_50MHz ( clk_50MHz ),
.rst_n ( rst_n ),
.Phase ( Phase ),
.Sin ( Sin ),
.Cos ( Cos ),
.Error ( Error )
);
initial
begin
#0
clk_50MHz = 1'b0;
#10000
rst_n = 1'b0;
#10000
rst_n = 1'b1;
#10000000
$stop;
end
always #10000
begin
clk_50MHz = ~clk_50MHz;
end
always @ (posedge clk_50MHz or negedge rst_n)
begin
if(!rst_n)
cnt <= 1'b0;
else
cnt <= cnt_n;
end
always @ (*)
begin
if(16'd359)
cnt_n = 1'b0;
else
cnt_n = cnt + 1'b1;
end
//生成相位,Phase[17:16]为相位的象限,Phase[15:0]为相位的值
always @ (posedge clk_50MHz or negedge rst_n)
begin
if(!rst_n)
Phase <= 1'b0;
else
Phase <= Phase_n;
end
always@(*)
begin
if(cnt <=16'd90)
Phase_n = cnt;
elseif(cnt >16'd90&& cnt <=16'd180)
Phase_n ={2'd01,cnt -16'd90};
elseif(cnt >16'd180&& cnt <=16'd270)
Phase_n ={2'd10,cnt -16'd180};
elseif(cnt >16'd270)
Phase_n ={2'd11,cnt -16'd270};
end
endmodule
基于Shane’s硬件同步从设置FIFO接口实例
FPGA通过同步从设备FIFO接口连接至USB3.0芯片CYUSB3014。
固件和软件组件
用到的固件和软件组件主要包括以下内容:
- FX3同步从设备FIFO固件(firmwave)
- Control Center和Streamer软件工具
下图显示了FPGA和FX3之间的互联概念图:
该实例包括以下部分:
- 回送传输:FPGA先从FX3读取整个缓冲区的内容,然后将其写会到FX3内。USB主机应该发送 OUT/IN 令牌数据包,用于发送和接收该数据。可以使用Control Center工具实现该操作。
- 短数据包:FPGA先将一个完整的数据包传送到FX3,然后再发送一个短数据包。USB主机应该发送IN令牌数据包,用于接收该数据。
- 零长度数据包(ZLP)传输:FPGA先将一个完整的数据包传输到FX3,然后在发送一个零长度数据包。USB主机应该发送IN令牌数据包,用于接收该数据。
- 串流(IN)数据传输:FPGA实现单向传输,即是通过同步从设备FIFO连续将数据写入到FX3。USB主机应该发送IN令牌数据包,用于接收该数据。
- 串流(OUT)数据传输:FPGA实现单向传输,即是通过同步从设备FIFO从FX3连续读取数据。USB主机应该发送OUT令牌数据包,用于发送该数据。
FPGA实现的详细信息
使用Altera Cyclone IV(EP4CE40F23I7N) +CYUSB3014的电路实现。
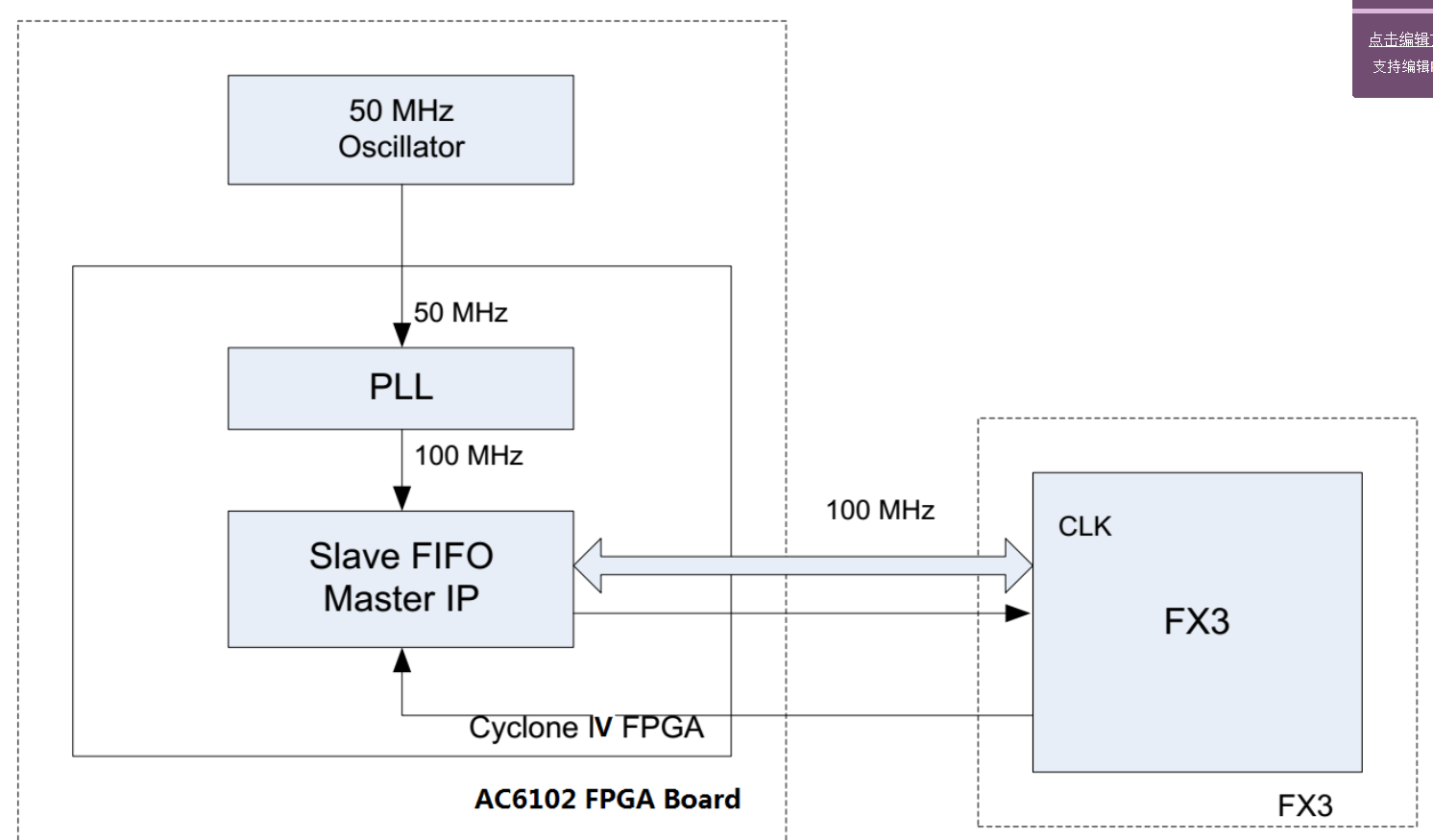
为了得到FX3的最大性能,CPIF II接口将以100MHz的频率工作。本硬件外部配置了50MHz的有源晶振。FPGA内部使用PLL,从50MHz外部时钟生成一个100MHz的时钟。
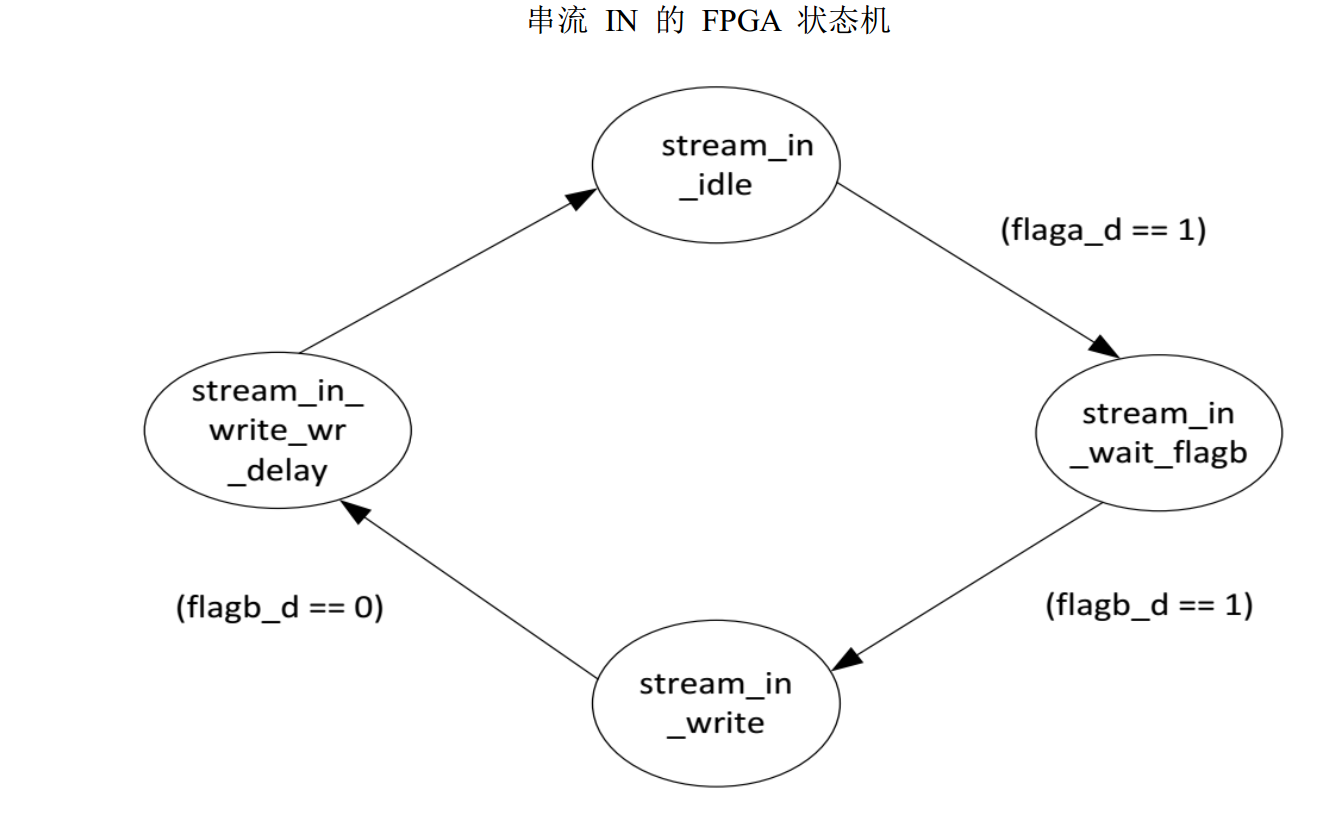
串流IN实例(FPGA对从设备FIFO进行写操作)
下图显示了Verilog RTL中针对串流IN传输执行的状态机。
-
stream_in_idle状态:
该状态用于初始化状态机中所使用的所有寄存器和信号。
从设备FIFO控制线的状态为:
PKTEND# = 1; SLOE# = 1; SLRD# = 1; SLCS# = 0; SLWR# = 1; A[1:0];
-
stream_in_wait_flagb状态:
每当flaga_d = 1时,状态机将进入该状态,并等待flagb_d。
-
stream_in_write状态:
每当flagb_d = 1时,状态机进入该状态,并开始写入从设备FIFO接口。从设备FIFO控制线的状态为:
PKTEND# = 1; SLOE# = 1; SLRD# = 1; SLCS# = 0; SLWR# = 0; A[1:0] = 0;
-
stream_in_write_wr_delay状态:
每当flagb_d = 0时,状态机将进入该状态。从设备FIFO控制线的状态为:
PKETEND# = 1; SLOE# = 1; SLRD# = 1; SLCS# = 0; SLWR# = 1; A[1:0] = 0;
经过一个时钟周期后,状态机将进入stream_in_idle状态,根据使用局部标值情况下的通用公式,局部标志flagb变为0后,FX3需要对处于激活状态的SLWR#进行采样两个周期。由于考虑到FPGA至接口哦的一个周期的传输延迟,FPGA再对被置为0的flagb_d(flagb的出发输出)进行采样后激活SLWR#一个周期。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
module slaveFIFO2b_streamIN(
input reset_in_, //input reset active low
input clk, //input clp 50 Mhz
inout [31:0]fdata, //data bus
output [1:0]faddr, //output fifo address
output slrd, //output read select
output slwr, //output write select
input flaga, //full flag
input flagb, //partial full flag
input flagc, //empty flag
input flagd, //empty partial flag
output sloe, //output output enable select
output clk_out, //output clk 100 Mhz and 180 phase shift
output slcs, //output chip select
output pktend, //output pkt end
output [1:0]PMODE,
output RESET
// output PMODE_2 //used for debugging
);
reg [2:0]current_stream_in_state;
reg [2:0]next_stream_in_state;
reg [31:0]data_gen_stream_in;
//parameters for StreamIN mode state machine
parameter [2:0] stream_in_idle = 3'd0;
parameter [2:0] stream_in_wait_flagb = 3'd1;
parameter [2:0] stream_in_write = 3'd2;
parameter [2:0] stream_in_write_wr_delay = 3'd3;
reg flaga_d;
reg flagb_d;
reg flagc_d;
reg flagd_d;
//output signal assignment
assign slrd = 1'b1;
assign slwr = slwr_streamIN_d1_;
assign faddr = 2'd0;
assign sloe = 1'b1;
assign fdata = (slwr_streamIN_d1_) ? 32'dz : data_gen_stream_in;
assign PMODE = 2'b11;
assign RESET = 1'b1;
assign slcs = 1'b0;
assign pktend = 1'b1;
wire clk_100;
wire lock;
wire reset_;
//clock generation(pll instantiation)
pll inst_clk_pll
(
.areset(1'b0/*reset2pll*/),
.inclk0(clk),
.c0(clk_100),
.locked(lock)
);
//ddr is used to send out the clk(ODDR2 instantiation)
//
ddr inst_ddr_to_send_clk_to_fx3
(
.datain_h(1'b0),
.datain_l(1'b1),
.outclock(clk_100),
.dataout(clk_out)
);
assign reset_ = lock;
///flopping the INPUTs flags
always @(posedge clk_100, negedge reset_)begin
if(!reset_)begin
flaga_d <= 1'd0;
flagb_d <= 1'd0;
flagc_d <= 1'd0;
flagd_d <= 1'd0;
end else begin
flaga_d <= flaga;
flagb_d <= flagb;
flagc_d <= flagc;
flagd_d <= flagd;
end
end
assign slwr_streamIN_ = ((current_stream_in_state == stream_in_write)) ? 1'b0 : 1'b1;
reg slwr_streamIN_d1_;
always @(posedge clk_100, negedge reset_)begin
if(!reset_)begin
slwr_streamIN_d1_ <= 1'b1;
end else begin
slwr_streamIN_d1_ <= slwr_streamIN_;
end
end
//streamIN mode state machine
always @(posedge clk_100, negedge reset_)begin
if(!reset_)begin
current_stream_in_state <= stream_in_idle;
end else begin
current_stream_in_state <= next_stream_in_state;
end
end
//StreamIN mode state machine combo
always @(*)begin
next_stream_in_state = current_stream_in_state;
case(current_stream_in_state)
stream_in_idle:begin
if(flaga_d == 1'b1)begin
next_stream_in_state = stream_in_wait_flagb;
end else begin
next_stream_in_state = stream_in_idle;
end
end
stream_in_wait_flagb :begin
if (flagb_d == 1'b1)begin
next_stream_in_state = stream_in_write;
end else begin
next_stream_in_state = stream_in_wait_flagb;
end
end
stream_in_write:begin
if(flagb_d == 1'b0)begin
next_stream_in_state = stream_in_write_wr_delay;
end else begin
next_stream_in_state = stream_in_write;
end
end
stream_in_write_wr_delay:begin
next_stream_in_state = stream_in_idle;
end
endcase
end
//data generator counter for StreamIN modes
always @(posedge clk_100, negedge reset_)begin
if(!reset_)begin
data_gen_stream_in <= 32'd0;
end else if(slwr_streamIN_d1_ == 1'b0) begin
data_gen_stream_in <= data_gen_stream_in + 1;
end
end
endmodule